
入試ナビ
システム制御情報工学科Department of Systems, Control and Information Engineering
- ホーム
- システム制御情報工学科
- 幅広い知識を
身につけた
技術者の育成 -
システム制御情報工学科は,ロボットに代表されるような,日々進歩を続けている機械・電気技術から生み出される様々な要素(部品)をコンピュータ技術を用いてシステムとして統合し,思い通りに制御できる能力を持つ技術者の育成を目的にしています.「コンピュータ中心のシステム作り」をキーワードとして機械工学,電気工学および情報工学の幅広い学問分野を5年間に渡って学びます。
プログラミングの知識と技術,技能を学ぶ内容は,専門科目のいたることろで実施され,実習工場でのモノづくりからコンピュータの世界の中でのモノづくりまで,手,足,指先,そして頭脳の全てを駆使したモノづくを実習,実験を通して体験的に学びます。
現在の私達の身の回りのほとんどの「モノ」がインターネットで繋がり,コンピュータを中心としたシステムとして有機的に働き,生活の利便性を向上させています。これより,コンピュータを中心とした工学的知識を身に付けることで,卒業生は機械・電機メーカー,IT企業のみならず電力,ガス,鉄道,建築,土木に関する様々な分野に就職しています。大学編入学においても情報系,機械系,電気系,理学系と幅広く,自分の興味のある分野に進んでいます。




Q1 自分の学科のおすすめポイントはなんですか
プログラミングだけではなく,機械を使用した金属加工もできる→オールラウンダーってこと!
フレンドリーで頼れる先生が沢山いる.
Q2 旭川高専の推せるところはどんなところですか
今行っているYouTuber活動のように出来ることの幅が広い.
さまざまなソフトウエアが学校では自由に使用できる.

(4年 陸上部 所属)
Q1 自分が制御科に入学した理由は
プログラミングや情報系の内容に興味があったから
Q2 高専に来て良かったと思うことはなんですか
1年生のころからC言語など,専門的な知識を早めに学べている.
校則があまり厳しくないところもいいところ.
Q3 どんな生徒が制御科を志望したら良いと思いますか
理系の科目を楽しいと思えて,さらに情報系に興味がある生徒.
幅広い知識を身につけたオー ルマイティな技術者を目指す
様々なテーマから選べる卒業研究
ロボット・生産技術

廃炉作業ロボット開発

クレーンの自動制御

自作ドローンの飛行実験

材料評価技術の開発
エネルギー / 情報・通信

ワンボードマイコンによる監視カメラ

学校をVR空間に再現

太陽電池の作製
画像・計測

Pepper+VR
システム作りに役立つ基礎的な知識・技術をバランスよく学ぶ
- 特徴的な教育
-

少人数による数学演習

豊富な情報処理教育
- 実験実習
-

材料変形の測定実験

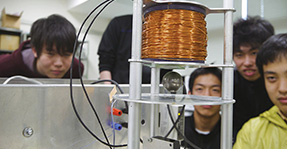
磁気浮上で鉄の球を浮かせます

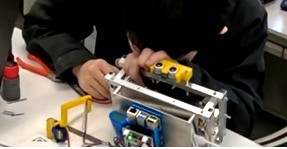
制御回路の実習

エンジン分解作業

最先端の自動加工技術
- 創造工学
-

制御プログラムも自分で考えます

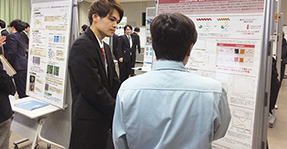
プレゼンもします

チームで協議してロボットを開発します

開発したロボット

自律走行ロボットの競技会
入学者に求める能力と適性アドミッションポリシー
- 1ロボットなどを作り動かすために必要な知識や技術を学びたい人
- 2幅広い知識や技術を用いて世の中を幸せにするモノづくりをしたい人
- 3グローバルな視野を持って、国内及び国際社会で活躍したい人
- 4コンピュータを用いたモノづくりに興味を持ち、未知のことにチャレンジする人
- 5いつも夢を持ち、その実現まであきらめないで努力を続ける人
卒業認定方針ディプロマ・ポリシー
全学科共通の卒業認定方針以外に所定の単位を修得し、
かつ以下のような能力を身につけた学生に卒業を認定します。
- 機械工学、電気・電子工学、情報工学における知識と、システムデザインの考え方を身につけ、多様な複合・融合領域にまたがる分野に対応することができる。
- 機械、電気・電子、情報分野の実践力を身につけ、社会的課題に対応できるように、他者と協働しながら自主的に行動することができる。
- 自らの専門分野を中心として他分野に渡る課題を発見したり、問題を解決できる力を身につけ、広い視野を持った思考力と創造性を発揮して、様々なシステムをデザインすることができる。

教員一覧
| 職名 | 氏名 | 研究分野 | 校務分掌 |
|---|---|---|---|
| 教授 |
知能機械学・機械システム |
評価改善室員 |
|
|
知能機械学・機械システム |
校長補佐(研究・地域連携担当),5S学級担任 |
||
|
機械力学・メカトロニクス,ロボティクス・知能機械システム |
3S学級担任 |
||
|
機械材料・材料力学 |
システム制御情報工学科長 |
||
|
マイクロ・ナノデバイス,電子デバイス・電子機器 |
教務主事 |
||
| 准教授 |
医用生体工学・生体材料学,医用システム,教育工学 |
寮務主事補 |
|
|
知覚情報処理・知能ロボティクス |
教務主事補 |
||
|
3Dプリンティング |
4S学級担任 |
||
|
採鉱工学,通信工学,人工知能 |
|
教育目標およびカリキュラムの編成方針
教育課程表およびシラバス
卒業研究一覧
システム制御情報工学科は,専門分野を狭く限定せずに,時代を先取りして情報工学,機械工学,電気・電子工学の3分野の基礎を学び,これらを融合する技術の土台作りに取り組み,第5学年での卒業研究では,2023年度は以下のようなテーマを下に卒業研究を進めました。
- 自然言語処理系AIの調査
- U-16プログラミングコンテストiPad学習教材
- 除雪DX化プラットフォームの開発・研究(クラウドサーバの構築)
- 除雪DX化プラットフォームの開発・研究(道路境界表示)
- 除雪DX化プラットフォームの開発・研究(除雪状況報告機能)
- 除雪DX化のためのWEBアプリケーションの作成
- 施設園芸農業のスマート化のための制御装置の開発
- 施設園芸農業のためのリアルタイムモニタリング装置の開発
- UECSを用いた環境計測ノードの試作と改良
- 真空ろ過法による高配向CNT膜作製プロセスの自動化と評価
- ステレオカメラを用いた畝の位置推定
- トイドローンのセンシング機能の拡張に関する研究
- 準天頂衛星システムを用いたドローンの改良と自動飛行実験
- 使用環境を考慮した樹脂製3Dプリントシューに用いられる素材の疲労試験
- 装蹄療法用3Dプリントシューの強度に及ぼす内外方向の積層角度の影響
- 装蹄療法用3Dプリントシューの強度に及ぼす前後方向の積層角度の影響
- 成形・機械的接合同時3Dプリンティングによって製造された部品の十字引張試験
- 肉厚および表面状態の異なる球状黒鉛鋳鉄の周波数掃引渦電流試験
- 3次元解析ソフトを用いた渦電流試験における試験プローブの検証
- 自動研磨装置を用いたSP試験片の研磨および試験の実施
- 3Dプリンターと鋳造による学生フォーミュラ車両用部材の製作法の開発
- 電気・電子系遠隔実験システムのコンテンツ改修・拡充
- 電気・電子系遠隔実験システムのソフトウェア改修・拡充
- 電気・電子系遠隔実験システムのワンボードPC機能改修
- 電気・電子系遠隔実験システムのハードウェア改修・拡充
- 深層強化学習による旋回クレーン振動制御の試行と展望
- 2リンク剛体-柔軟ロボットアームの開発と振動制御
- ロボットアームによる組立作業の自動化システムの開発
- 自動走行バレーボール運搬マシンの製作
- エアホッケーマシンの改良
- 左官アシストシステムの開発











- 〒071-8142 北海道旭川市春光台2条2丁目1-6
アクセス情報
Copyright 2022 National Institute of Technology, Asahikawa College. All rights reserved.